Diversos tipos de motores são necessários em muitos campos, incluindo o bem conhecidomotores de passoe servomotores. No entanto, muitos usuários não entendem as principais diferenças entre esses dois tipos de motores, e por isso não sabem como escolher. Então, quais são as principais diferenças entremotores de passoE servomotores?
Servomotor
1. Princípio de funcionamento
Esses dois motores são muito diferentes em princípio. O motor de passo utiliza um sinal de pulso elétrico para gerar um deslocamento angular ou linear através de um elemento de controle de malha aberta. Veja a seguir o princípio de funcionamento do motor de passo.
E o servo motor depende principalmente de pulsos para posicionamento. O próprio servo motor tem a função de enviar pulsos, de modo que, a cada rotação de um determinado ângulo, o servo motor envia o número correspondente de pulsos. Assim, ao receber o pulso, forma-se um eco, ou circuito fechado, permitindo que o sistema saiba exatamente quantos pulsos foram enviados e quantos foram recebidos, possibilitando o controle preciso da rotação do motor para alcançar um posicionamento exato.
2. Precisão de controle
A precisão do motor de passo é geralmente alcançada pelo controle preciso do ângulo de passo, que possui muitas engrenagens de subdivisão diferentes para obter esse controle preciso.
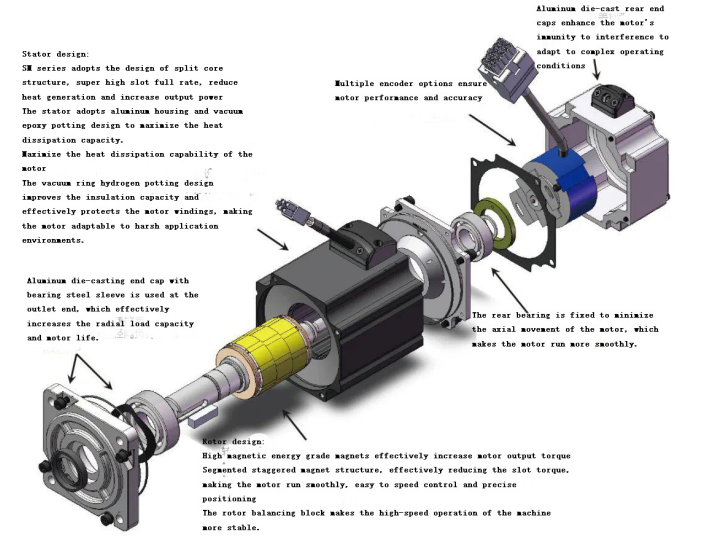
A precisão de controle do servomotor é garantida pelo codificador rotativo na extremidade traseira do eixo do motor, e a precisão de controle do servomotor é geralmente maior do que a do motor de passo.
3. Velocidade e capacidade de sobrecarga
Motores de passo em operação de baixa velocidade são propensos a vibrações de baixa frequência. Portanto, quando operam em baixa velocidade, geralmente é necessário utilizar tecnologias de amortecimento para superar esse fenômeno, como a adição de amortecedores ao motor ou o uso de circuitos de acionamento com subdivisão de fase. Já os servomotores não apresentam esse problema, e suas características de controle em malha fechada garantem excelente desempenho mesmo em altas velocidades. As características de momento-frequência dos dois são diferentes, e geralmente a velocidade nominal do servomotor é maior que a do motor de passo.
O torque de saída do motor de passo diminui à medida que a velocidade aumenta, enquanto o servomotor tem um torque de saída constante; portanto, o motor de passo geralmente não possui capacidade de sobrecarga, enquanto o servomotor CA possui uma capacidade de sobrecarga maior.
4. Desempenho na corrida
Os motores de passo geralmente possuem controle de malha aberta. Em casos de frequência inicial muito alta ou carga muito grande, podem ocorrer perda de passo ou travamento (single-out), sendo necessário, portanto, lidar com problemas de velocidade ou aumentar o número de encoders para obter controle de malha fechada. Veja o que é um motor de passo de malha fechada. Já os servomotores utilizam controle de malha fechada, sendo mais fáceis de controlar e não apresentando perda de passo.
5. Custo
O motor de passo é vantajoso em termos de custo-benefício, pois para obter a mesma função, o preço de um servomotor é maior do que o de um motor de passo com a mesma potência. A alta resposta, a alta velocidade e a alta precisão do servomotor determinam o preço elevado do produto, o que é inevitável.
Em resumo, os motores de passo e os servomotores apresentam diferenças significativas em termos de princípio de funcionamento, precisão de controle, capacidade de sobrecarga, desempenho operacional e custo. No entanto, ambos possuem vantagens próprias, e os usuários que desejam escolher entre eles devem considerar suas necessidades específicas e os cenários de aplicação.
Data da publicação: 09/11/2022