


Motor de passo híbrido NEMA 23 de alto torque com diâmetro de 57 mm.
Descrição
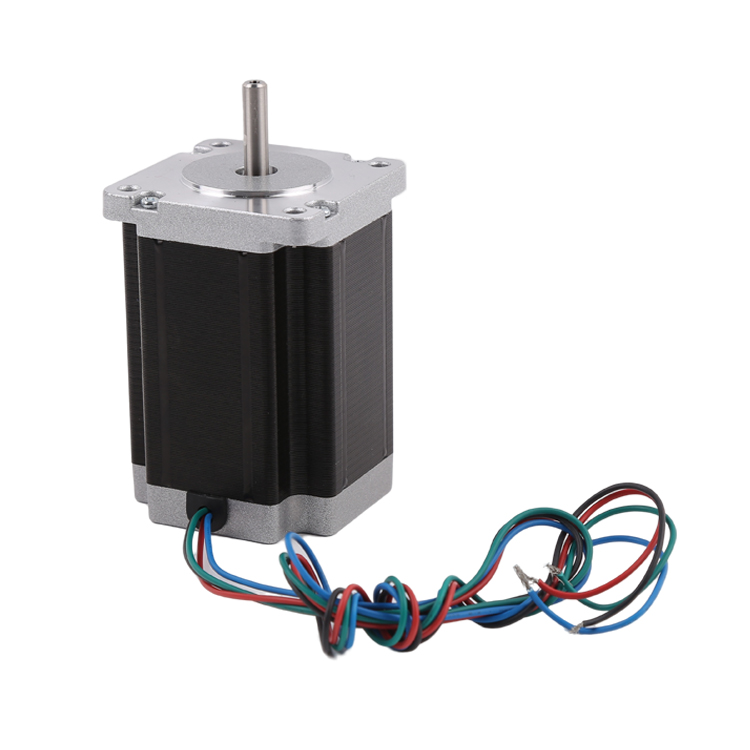
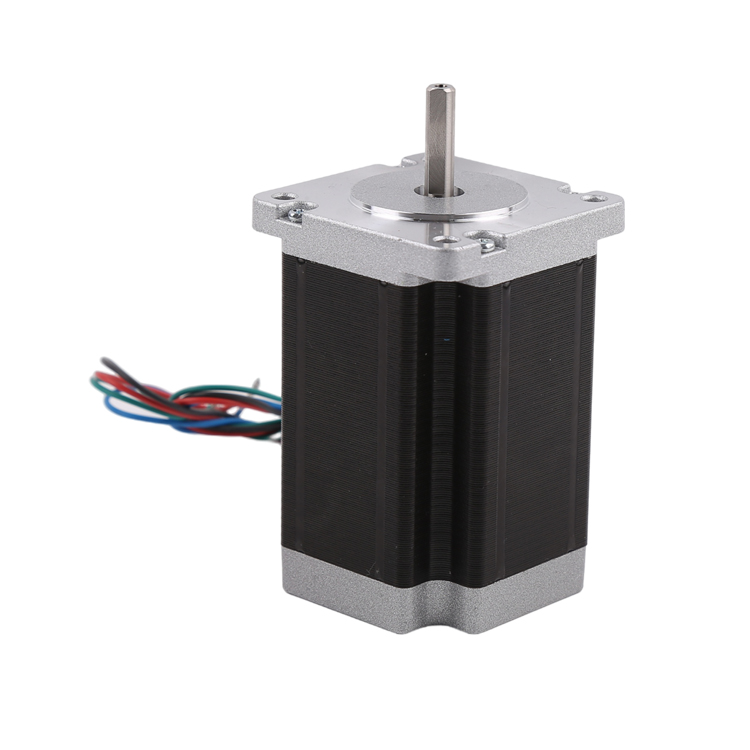
Este é um motor de passo híbrido NEMA 23 com 57 mm de diâmetro.
O ângulo de inclinação pode ser ajustado para 1,8 graus ou 0,9 graus, à escolha do cliente.
As alturas dos motores são 41 mm, 51 mm, 56 mm, 76 mm, 100 mm e 112 mm.
O peso e o torque do motor estão relacionados à sua altura.
O eixo de saída padrão do motor é o eixo em forma de D, que também pode ser substituído por um eixo trapezoidal com rosca guia.
Os clientes escolhem os parâmetros abaixo de acordo com suas necessidades. Não hesite em nos contatar caso tenha alguma dúvida sobre o motor; forneceremos suporte especializado.
Parâmetros
| Ângulo de degrau (°) | Comprimento do motor (mm) | Torque de retenção (g*cm) | Atual /fase (A/fase) |
Resistência (Ω/fase) | Indutância (mH/fase) | Número de pistas | Inércia rotacional (g*cm2) | Peso (KG) |
| 0,9 | 41 | 3,9 | 1 | 5.7 | 0,7 | 6 | 120 | 0,45 |
| 1.8 | 41 | 3,9 | 2 | 1.4 | 1.4 | 8 | 150 | 0,47 |
| 0,9 | 51 | 7.2 | 2 | 1.6 | 2.2 | 6 | 280 | 0,59 |
| 1.8 | 51 | 3009 | 2 | 1.8 | 2.7 | 8 | 230 | 0,59 |
| 0,9 | 56 | 12 | 2.8 | 0,9 | 3.3 | 4 | 300 | 0,7 |
| 1.8 | 56 | 9 | 2 | 1.8 | 2,5 | 6 | 280 | 0,68 |
| 0,9 | 76 | 18 | 2.8 | 1,15 | 5.6 | 4 | 480 | 1 |
| 1.8 | 76 | 13,5 | 3 | 1 | 1.6 | 6 | 440 | 1.1 |
| 1.8 | 100 | 30 | 4.2 | 0,75 | 3 | 4 | 700 | 1.3 |
| 1.8 | 112 | 31 | 4.2 | 0,9 | 3,8 | 4 | 800 | 1.4 |
Os parâmetros acima são produtos padrão para referência; o motor pode ser personalizado de acordo com as necessidades do cliente.
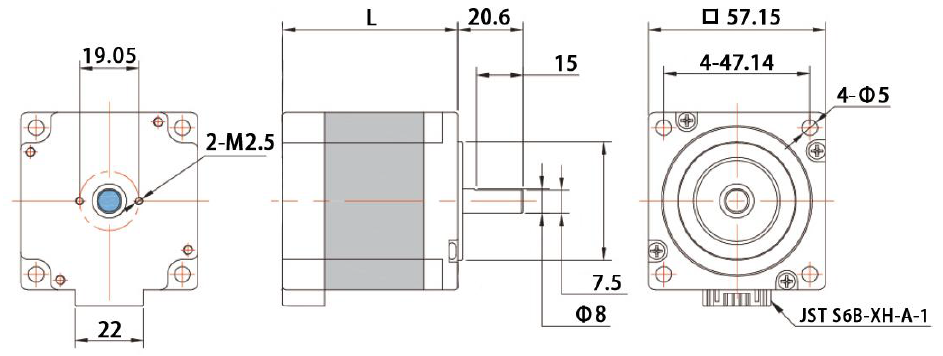
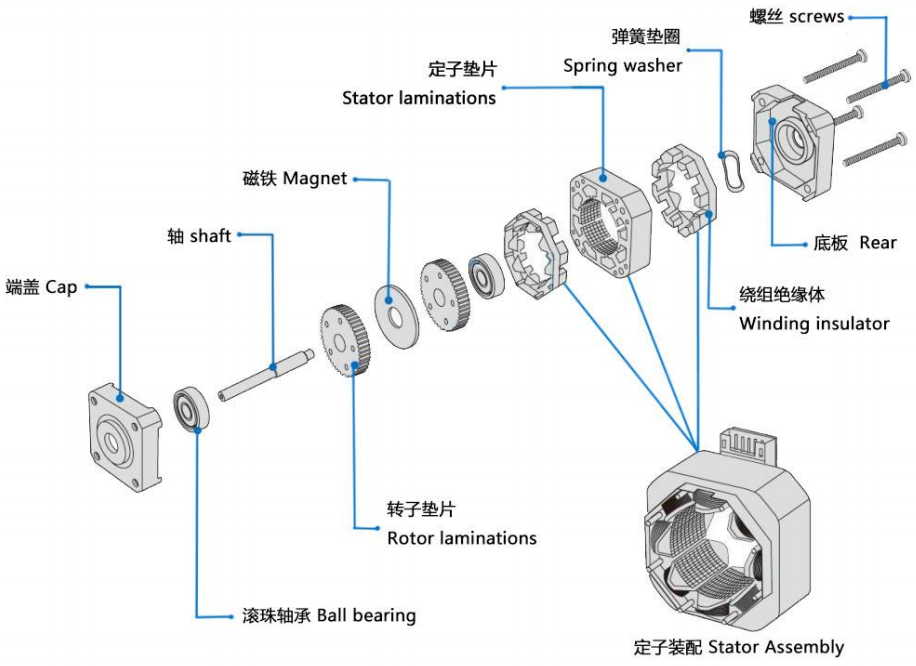
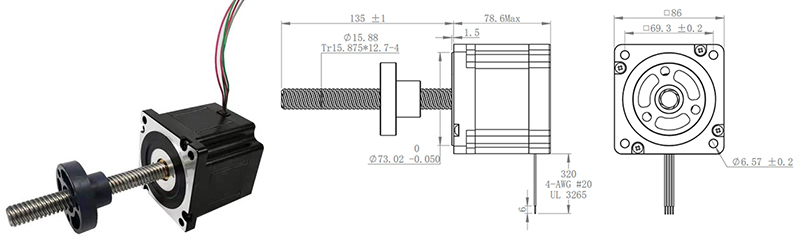
Desenho de projeto
Estrutura básica dos motores de passo NEMA
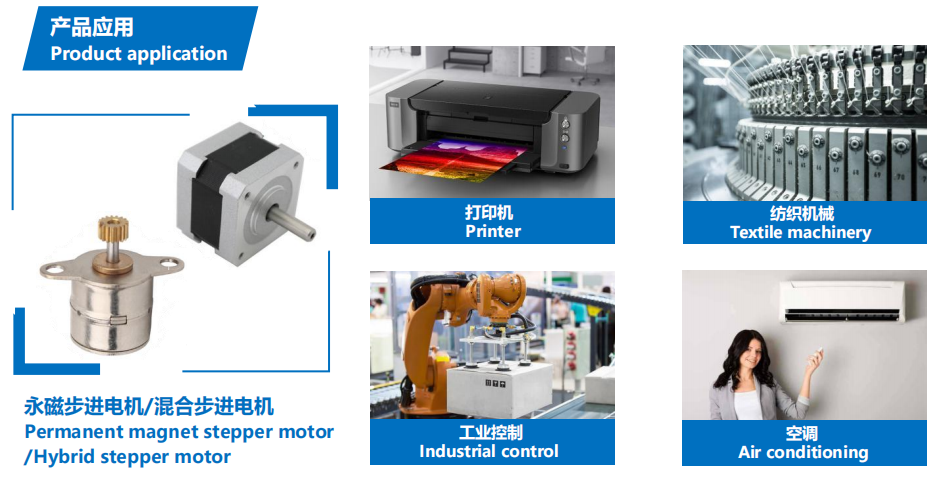
Aplicação de motor de passo híbrido
Devido à alta resolução dos motores de passo híbridos (200 ou 400 passos por revolução), eles são amplamente utilizados em aplicações que exigem alta precisão, tais como:
Impressão 3D
Controle industrial (CNC, fresadora automática, máquinas têxteis)
Periféricos de computador
Máquina de embalagem
E outros sistemas automáticos que exigem controle de alta precisão.
Notas de aplicação sobre motores de passo híbridos
Os clientes devem seguir o princípio de "selecionar primeiro os motores de passo e, em seguida, selecionar o driver com base no motor de passo existente".
É melhor não usar o modo de acionamento em etapas completas para controlar um motor de passo híbrido, pois a vibração é maior nesse modo.
O motor de passo híbrido é mais adequado para aplicações de baixa velocidade. Sugerimos que a velocidade não exceda 1000 rpm (6666 PPS a 0,9 graus), preferencialmente entre 1000 e 3000 PPS (0,9 graus), e pode ser acoplado a uma caixa de engrenagens para reduzir a velocidade. O motor apresenta alta eficiência e baixo ruído em frequências adequadas.
Por razões históricas, apenas os motores com tensão nominal de 12V utilizam essa tensão. Outras tensões nominais presentes no projeto podem não ser as mais adequadas para o funcionamento do motor. O cliente deve escolher a tensão e o driver adequados às suas necessidades.
Quando o motor é usado em alta velocidade ou com carga pesada, geralmente não inicia diretamente na velocidade de trabalho. Sugerimos aumentar gradualmente a frequência e a velocidade. Isso se deve a dois motivos: primeiro, o motor não perde passos e, segundo, reduz o ruído e melhora a precisão do posicionamento.
O motor não deve funcionar na faixa de vibração (abaixo de 600 PPS). Caso seja necessário utilizá-lo em baixa velocidade, o problema de vibração pode ser minimizado alterando a tensão, a corrente ou adicionando algum amortecimento.
Quando o motor funciona abaixo de 600 PPS (0,9 graus), ele deve ser acionado por corrente baixa, indutância alta e tensão baixa.
Para cargas com grande momento de inércia, deve-se selecionar um motor de grande porte.
Quando se exige maior precisão, isso pode ser resolvido adicionando uma caixa de engrenagens, aumentando a velocidade do motor ou utilizando acionamento por subdivisão. Um motor de 5 fases (motor unipolar) também pode ser usado, mas o preço de todo o sistema é relativamente alto, por isso seu uso é raro.
Dimensões do motor de passo:
Atualmente, dispomos de motores de passo híbridos de 20 mm (NEMA8), 28 mm (NEMA11), 35 mm (NEMA14), 42 mm (NEMA17), 57 mm (NEMA23) e 86 mm (NEMA34). Ao selecionar um motor de passo híbrido, sugerimos que primeiro determine o tamanho do motor e, em seguida, confirme os demais parâmetros.
Serviço de personalização
O design do motor pode ser ajustado de acordo com as necessidades do cliente, incluindo:
Diâmetro do motor: temos motores com 6 mm, 8 mm, 10 mm, 15 mm e 20 mm de diâmetro.
Resistência da bobina/tensão nominal: a resistência da bobina é ajustável e, quanto maior a resistência, maior a tensão nominal do motor.
Design do suporte/comprimento do fuso: caso o cliente deseje que o suporte seja mais longo/curto, com um design especial, como furos de montagem, ele é ajustável.
Placa de circuito impresso (PCB) + cabos + conectores: O design da PCB, o comprimento dos cabos e o espaçamento dos conectores são ajustáveis e podem ser substituídos por um FPC (placa de circuito impresso flexível) caso o cliente necessite.
Tempo de espera
Se tivermos amostras em estoque, podemos enviá-las em 3 dias.
Caso não tenhamos amostras em estoque, precisaremos produzi-las, e o prazo de produção é de aproximadamente 20 dias corridos.
Para produção em massa, o prazo de entrega depende da quantidade do pedido.
Método de pagamento e condições de pagamento
Para amostras, geralmente aceitamos Paypal ou Alibaba.
Para produção em massa, aceitamos pagamento por transferência bancária (T/T).
Para amostras, solicitamos o pagamento integral antes da produção.
Para produção em massa, podemos aceitar 50% de pagamento antecipado antes da produção e os 50% restantes antes do envio.
Após realizarmos mais de 6 pedidos em conjunto, poderemos negociar outras condições de pagamento, como A/S (após a vista).
Perguntas frequentes
1. Qual é o prazo de entrega geral para amostras? Qual é o prazo de entrega para grandes encomendas?
O prazo de entrega para pedidos de amostra é de cerca de 15 dias, enquanto para pedidos em grande quantidade é de 25 a 30 dias.
2. Vocês aceitam serviços personalizados?
Aceitamos personalização de produtos, incluindo parâmetros do motor, tipo de fio condutor, eixo de saída, etc.
3. É possível adicionar um encoder a este motor?
Para este tipo de motor, podemos adicionar um encoder na tampa de desgaste do motor.
Perguntas frequentes
1. Causas e soluções para o aumento da carga em motores de passo após uso prolongado.
Causa: Em alguns casos, os motores de passo podem funcionar normalmente por um longo período, mas após algum tempo começam a perder passos. Nesse caso, é provável que a carga sobre o motor de passo tenha se alterado. Isso pode ser causado pelo desgaste dos rolamentos do motor de passo ou por influências externas.
Solução.
①Verificar se o ambiente externo não mudou: O mecanismo de acionamento do motor foi alterado?
②Verificar o desgaste dos rolamentos: Use rolamentos de esferas em vez de buchas para prolongar a vida útil do motor.
③ Verifique se a temperatura ambiente não mudou. Para micromotores, o efeito da viscosidade da graxa do rolamento não é desprezível. Use graxa adequada à faixa de operação. (Por exemplo, a graxa pode se tornar viscosa em temperaturas extremas ou sob uso prolongado, aumentando assim a carga do motor.)
2. Causas do aquecimento do motor de passo
①A corrente definida pelo driver é maior que a corrente nominal do motor.
②A velocidade do motor está muito alta.
③ O próprio motor possui grande inércia e torque de posicionamento, portanto, mesmo em operação em velocidade média, ele aquecerá, mas isso não afeta sua vida útil. O ponto de desmagnetização do motor está entre 130 e 200 °C, então temperaturas entre 70 e 90 °C são normais. Contanto que a temperatura esteja abaixo de 130 °C, geralmente não há problema. Se você perceber superaquecimento, ajuste a corrente de acionamento para cerca de 70% da corrente nominal do motor ou reduza um pouco a velocidade do motor.
3. Quando o motor de passo é ligado, o eixo do motor não gira. O que fazer?
Existem vários motivos pelos quais o motor pode não girar.
A. Sobrecarga bloqueando a rotação
B. se o motor foi danificado
C. se o motor está desligado
D. Se o sinal de pulso CP for zero
Envie-nos a sua mensagem:
Categorias de produtos
-

Motor de passo híbrido linear NEMA34 de 86 mm externo...
-

Motor de passo híbrido NEMA11 de 28 mm com ângulo de inclinação de 1,8 graus...
-

Motor de passo híbrido NEMA8 de 20 mm com passo de 1,8 graus...
-

Motor de passo com caixa de engrenagens planetária de 35 mm (NEMA 14) ...
-

Cabo híbrido NEMA 6 de alta precisão, bifásico, 4 fios, 14 mm...
-

Motor de passo híbrido NEMA 17 de alta precisão de 42 mm...