




Motor subaquático à prova d'água de 24V a 36V com empuxo de 7kg a 9kg
Descrição
O motor brushless subaquático SW4025 tem classificação de 24 a 36 V CC e foi especialmente projetado para drones/robôs subaquáticos. Este modelo não inclui hélice; os usuários podem projetar suas próprias hélices e fixá-las com parafusos.
Este é um motor brushless comum, que pode ser acionado por qualquer controlador ESC de drone comum ou controlador de motor brushless comum.
Design elegante, longa vida útil, tecnologia de baixo ruído, alta taxa de economia de energia, alto torque e alta precisão.
É amplamente utilizado em equipamentos eletrônicos de precisão, equipamentos de automação, equipamentos aquáticos e subaquáticos, drones para aeromodelismo e robôs inteligentes.
Antes de fazer o pedido, certifique-se de que você tem a capacidade de projetar a hélice.
Parâmetros
| Tipo de motor | Motor subaquático sem escovas |
| Peso | 310g |
| Impulso subaquático | 7 kg a 9 kg |
| Tensão nominal | 24~36V |
| Valor KV | 200~300 |
| Velocidade de descarga | 7000 |
| Potência nominal | 450~800W |
| Corrente carregada | 15~23A |
| torque nominal | 0,9 N*m |
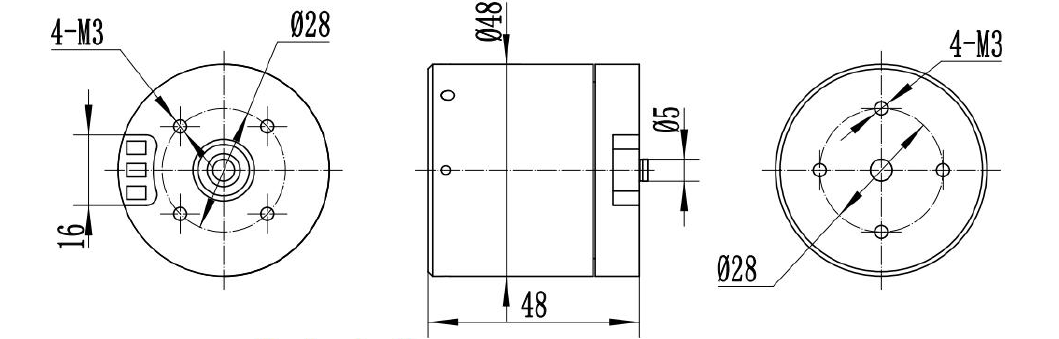
Desenho do projeto: Orifícios para parafusos na parte superior usados para fixar a hélice.
Sobre motores subaquáticos
Como o motor sem escovas utiliza comutação eletrônica, seu funcionamento requer adaptação à tensão da fonte de alimentação CC do motor, ao driver (ESC) e ao sinal de controle de velocidade.
Tomando como exemplo um ESC de modelo comum, primeiro desconecte a fonte de alimentação, conecte os cabos do motor e o cabo do sinal de velocidade, gire o acelerador até o máximo (ciclo de trabalho completo), conecte a fonte de alimentação. Você ouvirá dois sons de "drop" (queda). Mova o acelerador rapidamente para a posição mais baixa e então você ouvirá o som normal de partida do motor "drop ---- drop" (queda - queda). A calibração do acelerador está completa e você pode ligar o motor normalmente. (O modo de operação do ESC pode variar de acordo com o fabricante. Consulte o manual do modelo do ESC correspondente ou entre em contato com o fabricante do ESC para obter mais detalhes.)
Os clientes podem usar um ESC (controlador eletrônico de velocidade) comum para drones para acionar este motor.
Fabricamos apenas motores e não fornecemos ESCs.
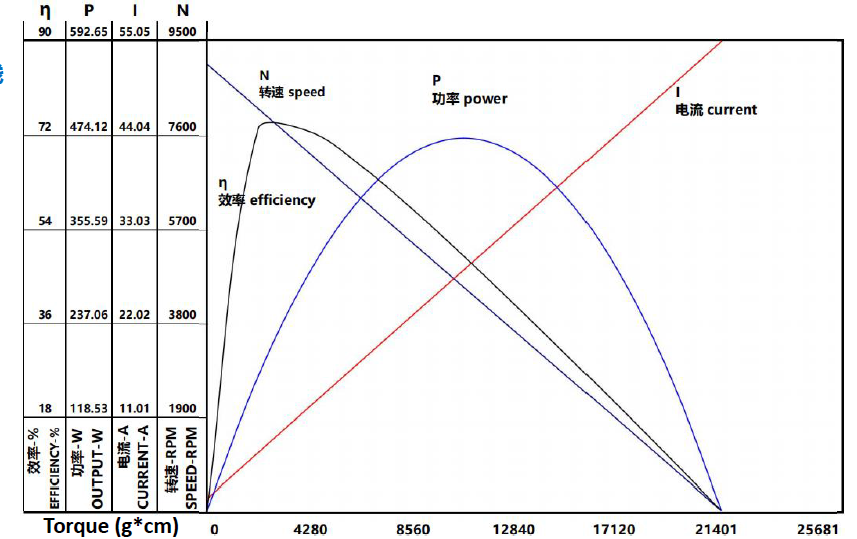
Curva de desempenho do motor SW2216 (16V, 550KV)
Vantagens do motor subaquático
1. À prova d'água e resistente à umidade para evitar curto-circuito dos componentes elétricos dentro da câmara.
2. Bloqueio eficaz de poeira e partículas para evitar o desgaste dos rolamentos.
3. Mantenha a cavidade seca para evitar que o motor e a carcaça sejam corroídos e oxidados, resultando em mau contato ou vazamento.
Aplicações
●Instrumento eletrônico de precisão
●Equipamentos de automação
●Equipamentos subaquáticos
●Drone de modelo de aeronave
●Robô Inteligente
Eixo de saída
1. Método de fiação
Primeiramente, o motor, a fonte de alimentação e o ESC devem ser selecionados com precisão, de acordo com a carga e as condições de uso. Uma tensão de alimentação muito alta pode danificar o motor e o ESC, enquanto uma potência de descarga insuficiente impede que o motor atinja a potência nominal, afetando seu desempenho. A seleção do ESC também deve ser compatível com a tensão nominal do motor. Os parafusos de instalação do motor não devem ser muito longos para não danificar a bobina. Antes de conectar os fios, por segurança, remova a carga do motor. Primeiro, conecte os três fios do ESC e do motor (dois dos três fios podem ser invertidos para inverter o sentido de rotação do motor) e, em seguida, conecte o fio de sinal do ESC. Preste atenção à ordem de conexão dos fios de sinal, não inverta a polaridade. Por fim, conecte a fonte de alimentação CC, observando que a polaridade (positivo e negativo) não deve ser invertida. A maioria dos ESCs disponíveis no mercado possui proteção contra inversão de polaridade. ESCs sem essa proteção podem queimar se a polaridade da fonte de alimentação for invertida.
2. Calibração do curso do acelerador.
Ao usar o ESC pela primeira vez, ou ao alterar a fonte do sinal PWM, ou ainda ao usar o sinal do acelerador descalibrado por um longo período, é necessário calibrar o curso do acelerador.
Informações sobre prazos de entrega e embalagens
Prazo de entrega das amostras:
Motores padrão em estoque: em até 3 dias
Motores padrão não disponíveis em estoque: em até 15 dias
Produtos personalizados: Aproximadamente 25 a 30 dias (dependendo da complexidade da personalização).
Prazo de entrega para a fabricação de um novo molde: geralmente cerca de 45 dias.
Prazo de entrega para produção em massa: varia de acordo com a quantidade do pedido.
Embalagem
As amostras são embaladas em espuma de poliuretano dentro de uma caixa de papelão e enviadas por serviço expresso.
Na produção em massa, os motores são embalados em caixas de papelão ondulado com película transparente externa. (Envio aéreo)
Se o envio for feito por via marítima, o produto será embalado em paletes.

Embalagem, método e prazo de entrega
| DHL | 3 a 5 dias úteis |
| UPS | 5 a 7 dias úteis |
| TNT | 5 a 7 dias úteis |
| FedEx | 7 a 9 dias úteis |
| EMS | 12 a 15 dias úteis |
| Correios da China | Depende do navio para qual país. |
| Mar | Depende do navio para qual país. |

método de pagamento
| método de pagamento | Mastercard | Visa | Verificação eletrônica | PAGUE DEPOIS | T/T | PayPal |
| Prazo de entrega para pedidos de amostra | cerca de 15 dias | |||||
| Prazo de entrega para pedidos em grande quantidade | 25 a 30 dias | |||||
| garantia de qualidade dos produtos | 12 meses | |||||
| Embalagem | Embalagem individual em caixa de papelão, 500 unidades por caixa. | |||||
Envie-nos a sua mensagem:
Categorias de produtos
-

Micromotor de passo de 3,3 V e 6 mm de alta qualidade e baixo ruído...
-

Eixo de parafuso M3, 2 fases, mini engrenagem de 10 mm...
-

Motor CC escovado N20 com caixa de engrenagens 1024, saída ...
-

Motor de passo híbrido NEMA 17 de alta precisão de 42 mm...
-

Motor de passo de ímã permanente de baixo ruído com 50 mm de diâmetro...
-

Motor de passo híbrido NEMA 23 de alto torque, 57 mm m...